Collaborators: Marc Strauss, Hasbro
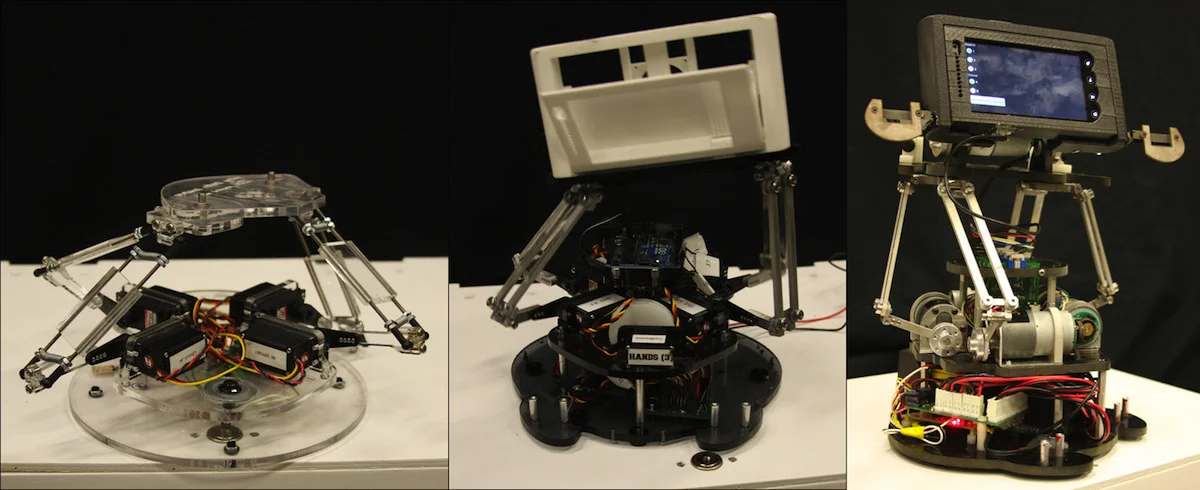
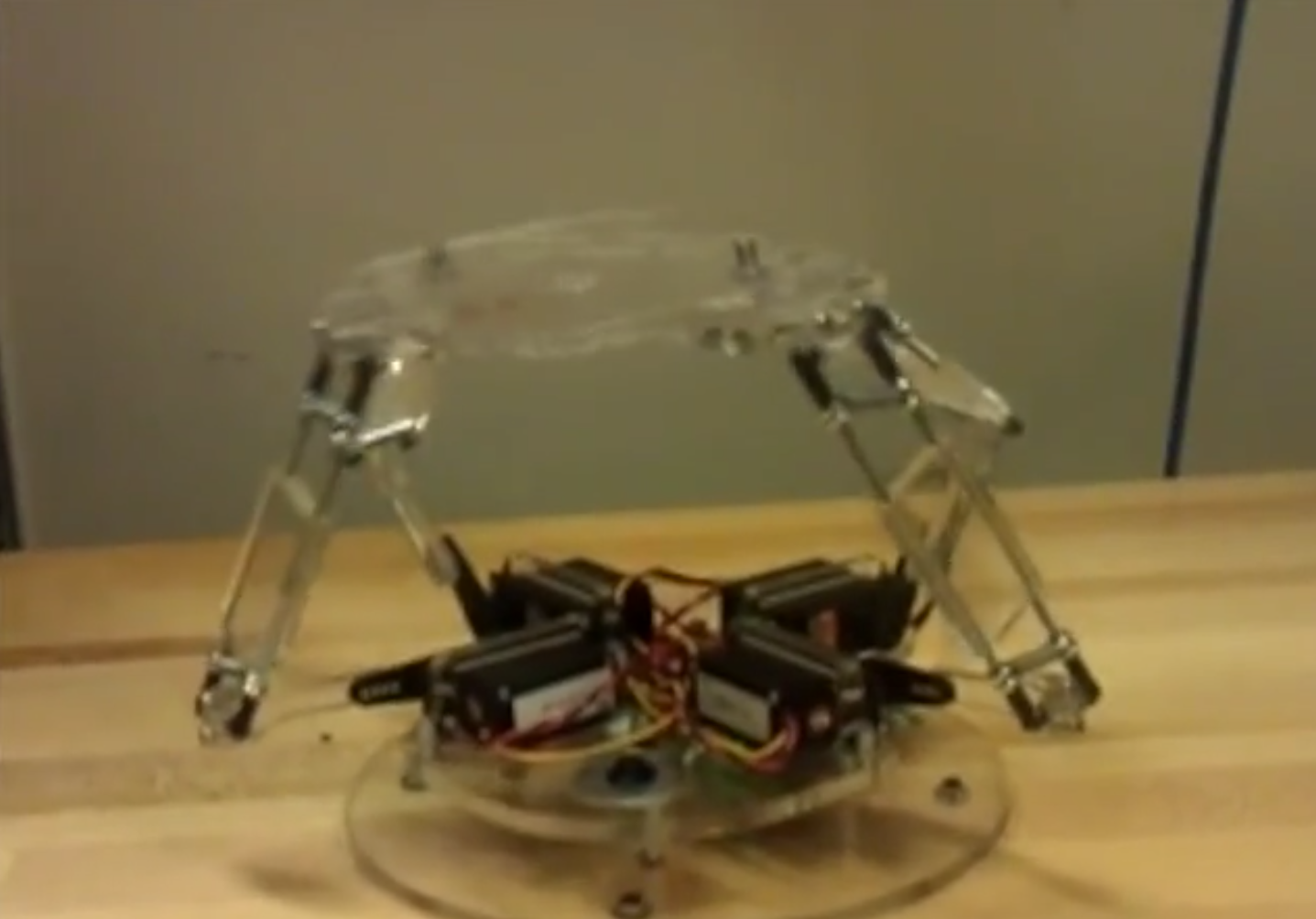
Nimbus is an exploration into using delta parallel manipulators for highly expressive tabletop robot characters. At the core of the platform lies a four degree-of-freedom delta manipulator, able to move the robot's head in all three translational directions and around a single rotational axis. Parallel manipulators, typically used in manufacturing pick-and-place robots, are also particularly well suited for creating expressive "squash-and-stretch" characters. Because animating the motion of the robot is as simple as controlling a single inverse kinematics handle, even people without animation expertise can easily program believable motions for Nimbus.
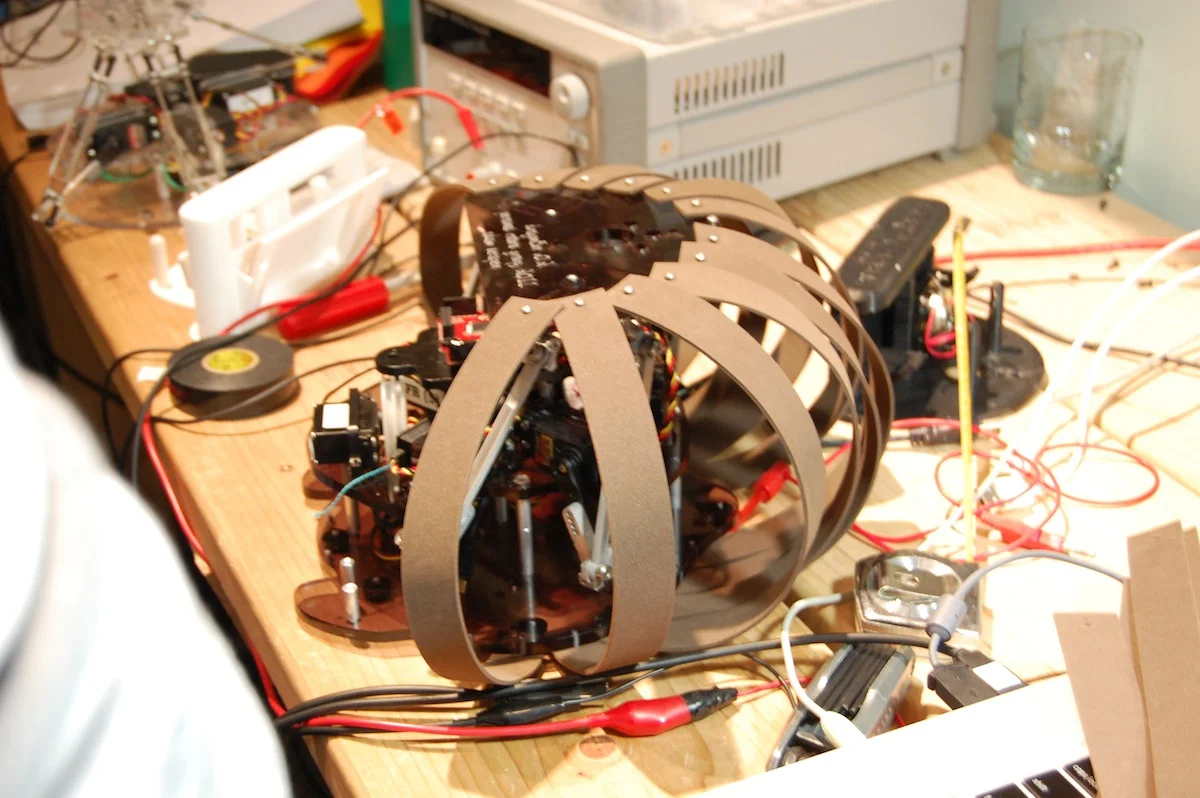
Nimbus also represents an exploration into robot "furs" that move organically with the kinematic constraints of the platform. Collaborating with engineers on the Soft Goods team at Hasbro, a sewing pattern was created for this platform that preserves the volume of the character, while deforming it like a balloon that is being squashed and stretched. Using passive elements like long-pile fur and silicone-casted hands and feet, Nimbus aims to increase believability with a very minimal number of manipulators.
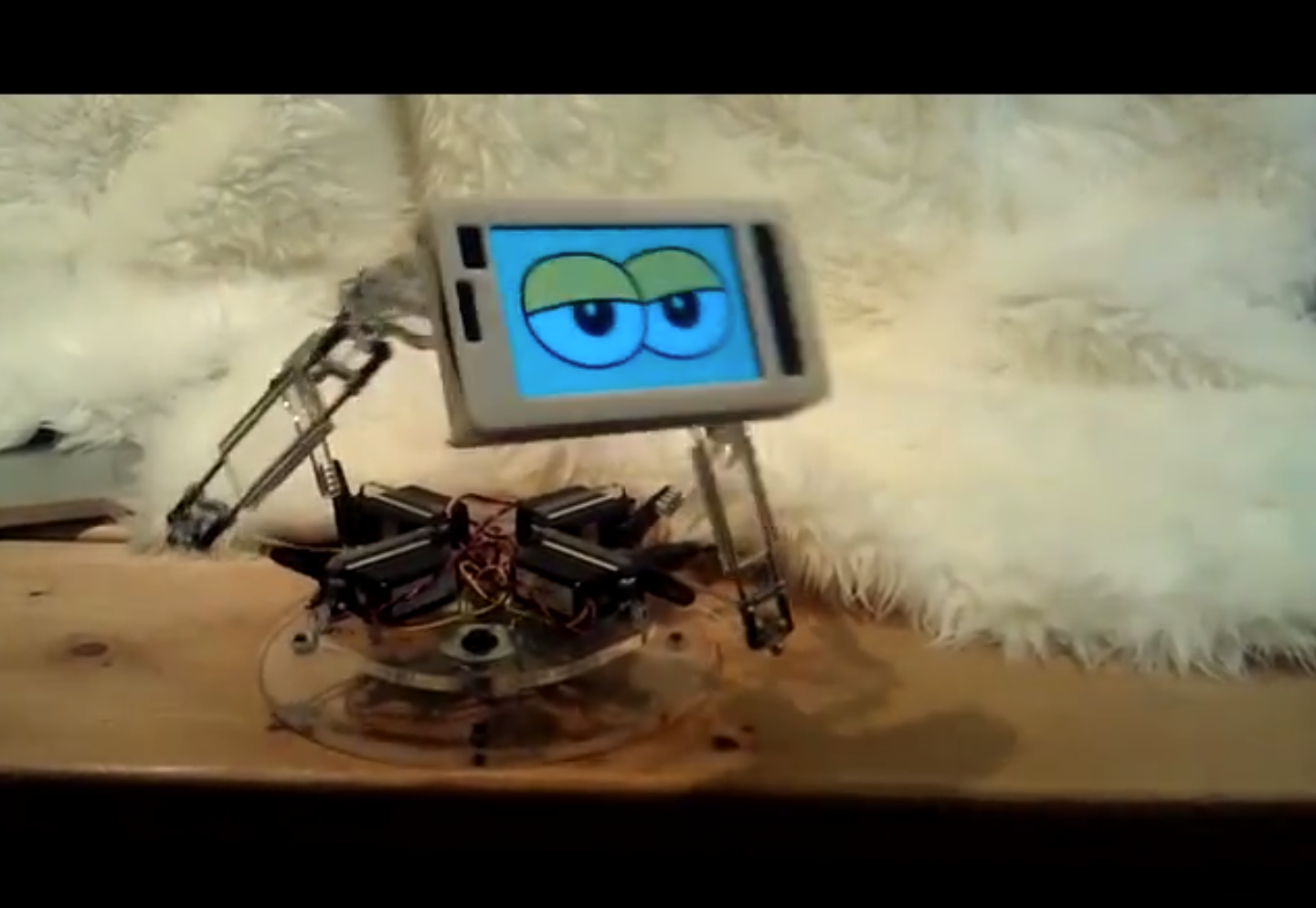
The furry exterior also has fabric capacitive electrodes sewn in, allowing for detection of touch and pre-touch in six distinct locations on the robot's body. The robot wirelessly receives information about any people in the environment from a Microsoft Kinect hidden in the environment, and Nimbus was programmed to want to mimic any people in front of it. The video below shows the robot's motion, and illustrates the robot moving along with humans and expressing elation when the human's motion coincides with the robot's.
Relevant Technologies
Rapid Prototyping, Fabric design, Molding and casting, SolidWorks, Eagle PCB, Android / Java, C, Python, Kinect and Point-Cloud Library (PCL)